A&A-Scheduler
Приложение A&A-Scheduler предназначена для работы с микроконтроллерами. Планировщик задач, предназначенный для управления Arduino и другими платформами микроконтроллеров с помощью устройств Android. Связь с микроконтроллером осуществляется с помощью USB UART переходника. A&A-Scheduler автоматически распознает драйвера USB UART переходников и пытается отправить запрос микроконтроллеру с ожиданием ответа готовности. После получения сигнала готовности A&A-Scheduler согласно запланированному графику будет отправлять соответствующие команды микроконтроллеру. A&A-Scheduler работает в фоновом режиме.
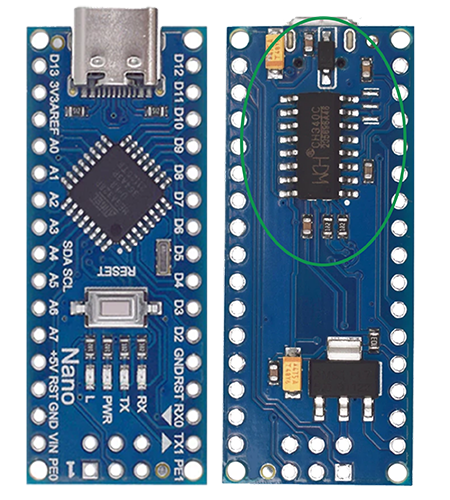
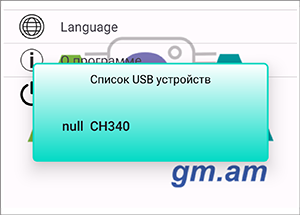
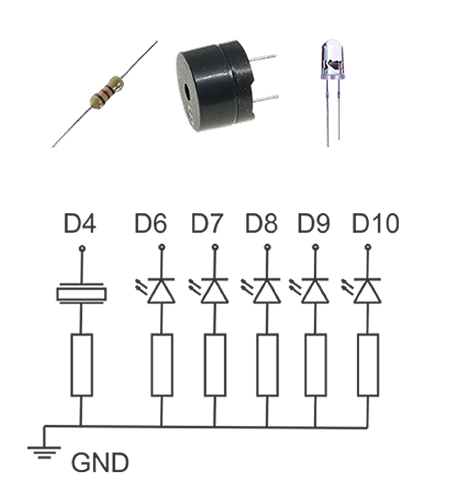
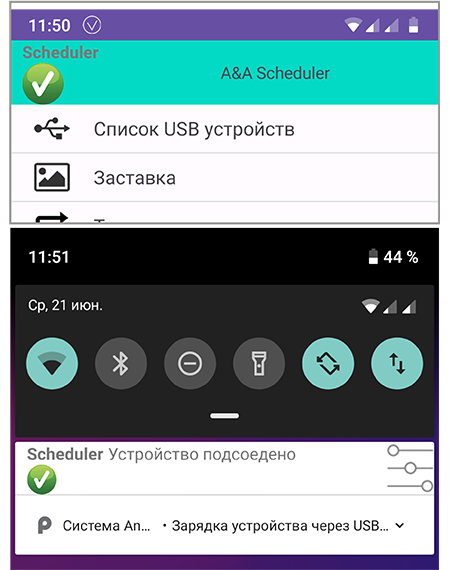
Чтобы разобраться как приложение работает с микроконтроллером рассмотрим простой пример. Суть примера продемонстрировать распознавание приложением подключение микроконтроллера и обработка микроконтроллером команд поступающих из приложения. Для этого воспользуемся платформу ардуино NANO, пьезо динамик, 5(шт.) светодиодов, 6(шт.) резисторов. Платформа ардуино NANO уже интегрирована с USB UART контролером и имеет USB разъем. Первым делом подключим NANO с помощью USB кабеля к нашему андроид устройству. При запуске приложения или если оно запущено система андроид у нас запросит разрешение для работы приложения с USB UART. На данном этапе не важно подтвердите или откажете этот запрос. Далее перейдите на экран управления и нажмите на пункт “Список USB устройств”. В открывшемся окне вы увидите строку с именем USB UART контролера (см. рис.). Следующим шагом необходимо собрать схему показанную на рисунке и подключить к соответствующим выводам ардуино NANO. Необходимо загрузить программу в микроконтроллер. Для этого воспользуемся “Arduino IDE”.
Ознакомится с скетчем можно ниже. После загрузки скетча в ардуино NANO его можно подключить к нашему андроид устройству. Питание для ардуино NANO будет поступать с андроид устройства. Теперь необходимо утвердить запрос системы о разрешении приложению работать с USB UART. После этого значок нот-сообщения сменится на “v”, а пьезо динамик подключенный к ардуино NANO выдаст звуковой сигнал. Как видно из скетча работа приложения с микроконтроллером осуществляется на скорости 115200 bit. При обнаружении USB UART контролера приложение отправляет запрос – stmA и ожидает ответ в виде - rtmA. После получения ответа приложение считает соединение с микроконтроллером установленным и готова отправлять запланированные команды. Прежде, чем запланировать задачу можно проверить как микроконтроллер реагирует на команды. После установления соединеня с микроконтроллером на экране управления выбираем пункт “Тестирование команд”. В открывшемся списке выбираем необходимую команду. Она сразу будет передана микроконтроллеру. Например “Commanda2 = 000011A” означает что будет передано - 000011A. В нашем примере это означает, что загорятся два светодиода и через 2 секунды погаснут.
Скетч для загрузки (здесь):
const int piezo_pin = 4; void loop() { |